精密测量技术是先进生产力的代表,它是集先进制造、自动控制、电子、光学、图形图像及计算机技术为一体的综合性交叉学科,于精密加工紧密联系在一起,近年来,精密测量产业得到迅猛发展。在我们的认知中,主要就是指二次元影像测量仪和三坐标测量机,这二者是精密测量仪器的主要内容。二次元影像测量仪适用于工件二维平面检测,三坐标测量机主要用于被测工件的三维立体的测量。由于空间测量时三坐标测量机应用受限,我司研发制造的多轴精密气浮运动平台用于精密测量系统中。
设备结构图
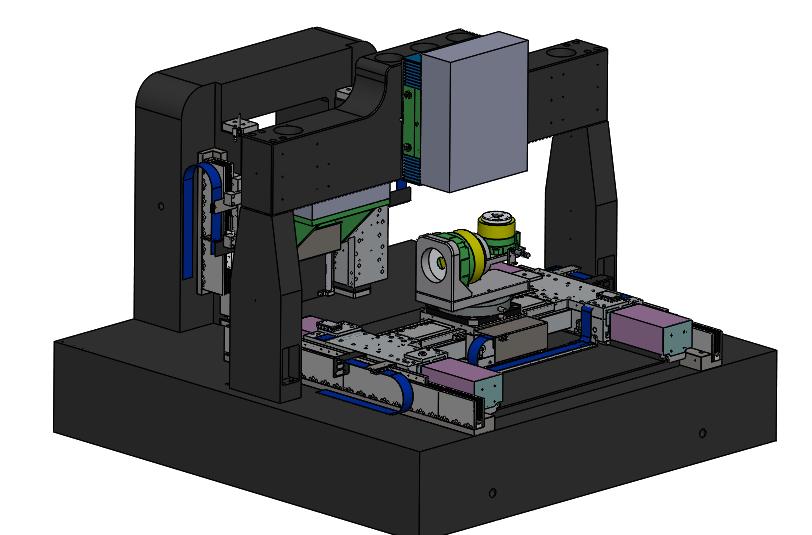
图1 结构图
结构阐述
X轴采用闭式气浮导轨导向,垂直采用真空预载,直线电机驱动和光栅尺闭环反馈,行程400mm,用于X方向连续扫描检测。
Y轴采用龙门气浮导轨导向,双直线电机驱动和双光栅尺闭环反馈,行程500mm,用于Y方向连续扫描检测或步进移动。
XY轴结构优势:工字形平面式气浮结构,使光栅反馈位置在同一水平面,避免因叠层引起的阿贝误差,另外X轴及负载直接承载在大理石气浮面上,避免横梁轴弯曲扰度变形。
A轴气浮转台行程±110°,C轴行程360°连续旋转。因摩擦式轴承转台,在不同速度及位置下的轴向及径向端跳误差不同,重复性较差,机械轴承转台轴向及径向误差在3um-5um,不利于提高整个系统的精度。
AC轴采用自制气浮转台,径向止推气浮轴承采用铝合金材质,紧凑的结构设计及特殊的装配工艺,保证百纳米级别的轴向误差和径向误差,独特的设计使气浮轴承间隙气流均匀分布,保证气浮转台稳定可靠。
AC轴安装方式:A轴轴心线平行于水平面(侧向安装),安装到X轴负载板上;C轴轴心线垂直于水平面(水平安装)。C轴负载5Kg(负载可定制)。
Z轴双工位测量,用于不同空间角度的测量。Z1轴采用气浮轴承导向,直线电机驱动和光栅尺闭环反馈,低摩擦重力平衡气缸做配重,行程150mm,垂向负载30Kg. Z2轴采用龙门气浮导轨导向,双直线电机驱动和双光栅尺闭环反馈,行程150mm,负载30Kg,负载重心与导轨受力面、质心驱动,低摩擦重力平衡气缸配重,见下图。
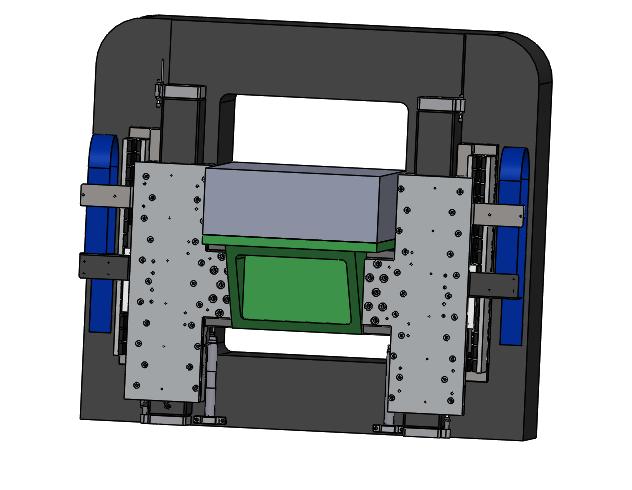
图2 Z2轴结构图
B轴用于Z方向角度位置调整,行程90°,采用直驱力矩电机驱动,交叉滚柱轴承导向,光栅尺反馈,增加硬限位防止360°连续旋转缠绕AC轴的线缆或损坏工件等,可承受100Kg负载,自重仅11Kg,转台整体高度55mm。
线缆管理
经过多年制造精密运动平台的经验,线缆管理对精度和性能有影响,我们选择进口无尘线缆,精心优化管线弯曲半径,防止动作过程中线缆的拉伸影响到气浮台的性能,以确保无故障操作,减少停机时间。无尘线缆相对于普通的坦克链,更适用于无尘洁净室。
控制方案
控制器,用EtherCAT通讯方式,多轴扩展性能好。在精密运动控制行业性能及精度最有保证。
控制器是基于频域的调试PIV方式,区别于传统PID凑参数方法,类似自整定模式调试方便,易上手。
支持C,.NET等语言二次开发编程,以调用动态链接库的形式,编辑上位机界面省时省力,可直接下载运行,支持G代码和M代码。
软件可安装在Windows ® XP/7/8/10等操作系统下,软件安装成功后,从电脑开始菜单中能够找到相关控制器使用及调试等相关手册,易快速掌握。
精度指标
|
轴号 |
X轴 |
Y轴 |
A轴 |
C轴 |
Z1轴 |
Z2轴 |
B轴 |
|
行程 |
400 mm |
500mm |
±110deg |
360deg |
150 mm |
150 mm |
90deg |
|
驱动方式 |
直线电机 |
直线电机 |
力矩电机 |
力矩电机 |
直线电机 |
直线电机 |
力矩电机 |
|
定位精度(补偿后) |
±250nm |
±300 nm |
±1arc sec |
±1arc sec |
±300nm |
±300nm |
±3arc sec |
|
重复定位精度 |
±200nm |
±200 nm |
±0.3arc sec |
±0.3arc sec |
±200nm |
±200nm |
±1arc sec |
|
直线度 |
400nm/100mm |
400nm/100mm |
/ |
/ |
±500nm |
±500nm |
/ |
|
平面度 |
400nm/100mm |
400nm/100mm |
/ |
/ |
±500nm |
±500nm |
/ |
|
Pitch Yaw |
±1arc sec |
±1arc sec |
/ |
/ |
±1arc sec |
±1arc sec |
/ |
|
同步轴向跳动 |
/ |
/ |
±0.1um |
±0.1um |
/ |
/ |
±5um |
|
同步径向跳动 |
/ |
/ |
±0.1um |
±0.1um |
/ |
/ |
±5um |
|
扫描速度 |
200mm/s |
200mm/s |
60rpm |
60rpm |
100mm/s |
100mm/s |
3rps |
|
速度 |
300mm/s |
300mm/s |
60rpm |
60rpm |
200mm/s |
200mm/s |
3rps |
|
加速度 |
0.5g |
0.5g |
90rad/s² |
200rad/s² |
0.2g |
0.2g |
200rad/s² |
|
负载 |
5Kg |
30Kg |
30Kg |
100Kg |
|||
|
正交性 |
XY轴≤±1.5 arc sec |
AC轴≤±2 arc sec |
Z1及Z2与XY轴≤±2 arc sec |
AB轴≤±2 arc sec |
|||
使用环境